
无人机电力巡检解决方案
第1章 前言
目前,中国电网规模已经超过美国,居世界第一。国际咨询机构GlobalData日前发布报 告称,到2020年,中国输电线路总里程将从2014年的115万千米增加至159万千米以上,以进一步加强全国范围内的供电质量。这意味着,中国输电线路建设的年复合增长率将达到6%,高于全球3%的增速。
尽管如此,与高速的增长相比,我国的电力巡线方法和技术却依然滞后,并造成不少人力、物力以及社会资源浪费。
第2章 电力巡检现状
l 长距离线路工程跨度大,人工进行大范围巡线时工作量巨大,且沿线地形地势复杂,个别线路杆塔位置特殊,人工巡检难以前往作业。
l 山区巡线具有高风险性,时刻威胁巡线人员生命安全。
l 遇到冰雪水灾、地震、滑坡等自然灾害天气时,巡线工作将无法开展。

l 传统人工巡线,借助目测或望远镜等工具,受视角影响,巡线不彻底,不能发现物体内部温度及老损情况,不能有效作业。

2.1无人机应用优势

l 降低劳动强度,提高工效率;
l 巡线工作环境受限制小,甚至能带电巡线,迅速高效完成巡线工作,比传统人工巡线工作效率高出40倍。

l 巡线速度快,发现缺陷和可能性故障能及时提供信息,通过高清图传将线路情况传回地面监控系统,以便判断故障;
l 可实现空中悬停,对疑似故障区域进行针对性排查;
l 人机分离作业,无需操作人员进入高危险工作环境中涉险,与有人直升机巡线相比,可提高巡线作业人员的安全性,降低成本;
l 小巧灵活,自动壁障功能可有效防止对电路、杆塔元件损伤;
2.2无人机应用中的功能

l 线路通道走廊检查
l 杆塔周边环境勘探
l 线下危险施工识别

l 可见光故障检测
l 红外线故障检测
l 倾斜摄影三维建模

l 线路通道高精度测绘
l 激光雷达数据收集
l 夜间抢修应急照明
2.3大范围巡检场景:
2.3.1功能:线路通道走廊检查


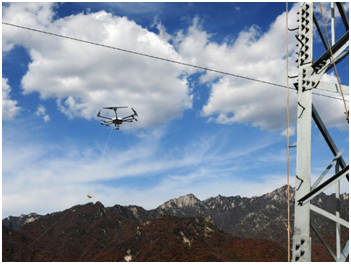
l V330倾转旋翼无人机主要用来巡视线路通道走廊,查看线路周边环境是否存在山火源、地质滑坡、树木过度生长等情况。
l V330倾转旋翼无人机具有续航时间长、巡视速度快、覆盖范围广、等特点,一个起落可以飞70-100公里,一天可以实现2-4个起落。它能够克服山区路况差、路途遥远等困难,是线路人员巡线的得力助手。
2.3.2功能:杆塔周边环境勘探


l 传统固定翼无人机的起降都需要有一块比较大的场地,这对于频繁的野外作业来说很难满足。无人机根据行业实际需求,自主研发倾转旋翼垂直起降固定翼无人机,具有场地需求小,无需跑道的优势,特别适合山区地形。
2.3.3功能:线下危险施工识别


n 飞机水平或稍高于导线,按一定的速度沿线路飞行,同时用机载可见光相机及红外热成像相机以45度水平角左右在线路斜上方对线路导线、铁塔、绝缘子、金具、线路走廊内目标进行扫描、录像、拍照及巡察。
2.4 精准排查场景:
2.4.1功能:可见光故障检测


l 凌云2无人机根据巡检事前编好的电塔GPS坐标点,进行自动飞行巡检,巡检内容包括图示中的:引流线(有无断股)、杆塔(有无鸟窝、损坏、变形、紧固金具松脱金具被盗)、绝缘子(有无闪落迹象、破损、污秽、异物悬挂)、防震锤(有无变形、存在异物)、线夹(有无松脱)、导线(有无断股、异物悬挂)、地面环境(有无在规定范围建筑房屋和超范围生长的植物)等内容。
2.4.2功能:红外线故障检测
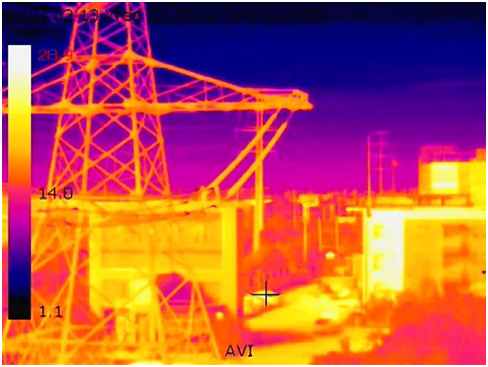
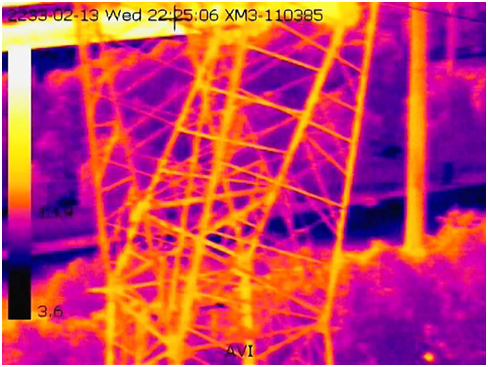
n 凌云2无人机通过挂载红外线热成像相机,对线路杆塔进行精准排查,通过温度异常变化对比值,发现隐蔽性较强的故障点,结合传统可见光巡线,热成像巡线将大大提高故障点检测的准确性。
n 凌云2无人机搭载热成像设备夜间巡检输电设备判断依据:导线(有无红色发热点)、线夹(有无接触点发热)、引流线(有无发热点)、绝缘子(有无击穿发热)、杆塔(有无击穿发热)、耐张管(有无发热)。
2.4.3功能:倾斜摄影三维建模

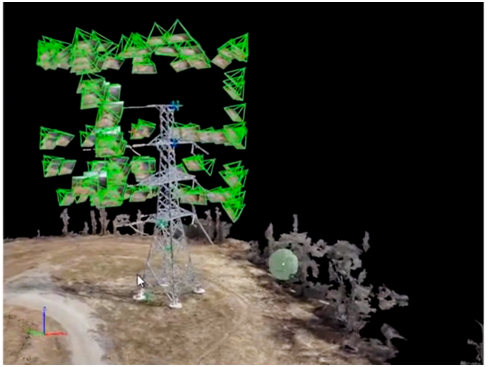
l 对于地形复杂的电力线路,利用凌云2无人机携带倾斜摄影系统对杆塔及周围环境进行地理信息收集,通过后台计算机处理,得到基于真实影像的三维重建模型,高精度还原电力线路现场地形地貌,巡检人员根据巡检内容信息判断巡检结果,并根据具体情况制定相应的解决措施。
2.5 精准排查场景:
2.5.1功能:线路通道高精度测绘


l 利用大航程无人机搭载高精度正射影像测绘系统,采集全程线路走廊通道的高分辨率航空数码影像,通过后台计算机处理,进而获得高精度线路走廊地形地貌、线路设施设备、以及走廊地物的二维正射影像地理信息,从而为电力线路规划设计、运行维护提供高精度测量数据成果。
2.5.2功能:激光雷达数据收集

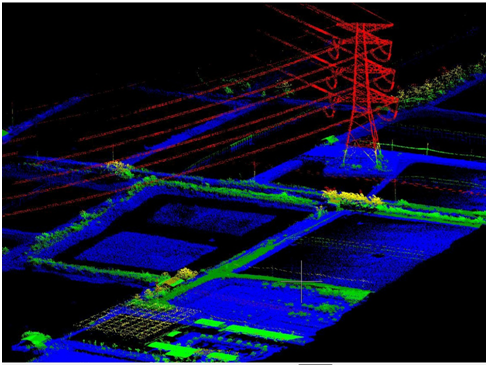
l 利用多旋翼搭载激光LIDAR测量系统,可以直接采集线路走廊高精度激光点云,进而获得高精度三维线路走廊地形地貌、线路设施设备,以及走廊地物的精确三维空间信息,包括杆塔、挂线点位置、电线弧垂、树木、建筑物等,从而为电力线路规划设计、运行维护提供高精度测量数据成果。
2.5.3功能:夜间抢修应急照明

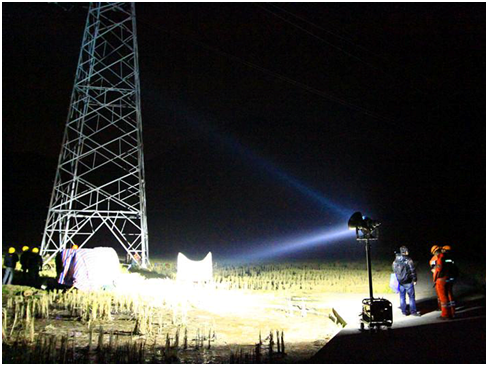
l 在夜间进行紧急线路抢修时,利用凌云2无人机搭载高亮度探照灯模块,悬停于杆塔上空,对抢修人员以及关键杆塔进行精准灯光照明,大大保障了抢修人员的人参安全,加快夜间抢修作业的进度。
2.5.4功能:牵引架线


l 利用无人机直接从空中携带引导绳抵达指定位置,不用砍伐植被,单独开辟架线通道,节约大量人力和时间成本,架线工程工期可控。
第3章 无人机系统解决方案
3.1 方案设计
3.1.1 遵循和参考标准规范
本系统方案设计主要依据:
1. GJB 150.1A-2009《军用装备实验室环境试验方法》
2. GJB 1389《系统电磁兼容性要求》
3. GJB 1403《机载电子设备安装和试验通用规范》
4. GJB 4108-2000《军用小型无人机系统部队试验规程》
5. GJB 5433-2005《无人机系统通用要求》
6. GJB 5434-2005《无人机系统试验方法》
3.1.2 系统组成
无人机系统由飞行系统、地面控制系统、任务载荷系统构成。如下图所示:

图 3‑1 无人机系统组成框图
3.1.3 总体方案
无人机系统可通过遥控器、箱式智能地面站对无人机进行飞行控制。通过高清图像传输系统可将监视区域的监控视频实时传回地面站、指挥中心,第一时间为指挥部门提供有效的现场信息。