无人值守远程视控系统与智能巡检机器人系统在铁路变配电所应用的比较
随着我国科学技术不断发展,铁路相关技术和水平也越来越受到人们的重视,当前,我国正处在一个自动化不断发展和前进的时期,铁路变配电所的无人值守化运行也成为了时代发展过程中的一个非常重要的趋势,因为这种运行方式能够节约变配电所电力生产过程中的人力、物力和财力投入,有效提升电力巡检的管理效率。
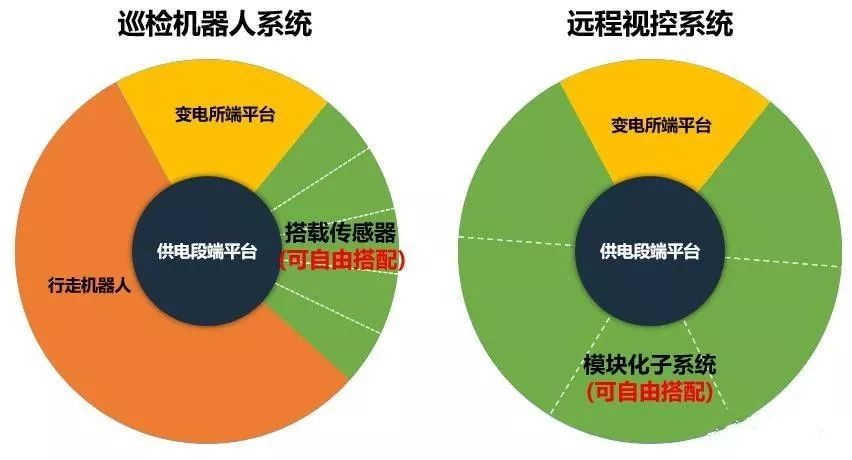
从实现方式上来分,目前主要有两种:无人值守远程视控系统、无人值守智能巡检机器人。
本文就这两种无人值守运行方式,从设备自身特点、环境适应性、系统改造要求、巡检实时性、系统功能、安全性、投资成本等方面进行分析,比较各自的优势与不足。

1.巡检速度
1

智能巡检机器人无论是轮式、足式、履带式、混合式,其平均行驶速度大约为1.5M/S,巡检速度低于1.0M/S,以400个巡检场景来算,运行一次完整的巡视作业大约需要3小时左右。
无人值守远程视控系统采用智能高清球型、云台型摄像机进行智能巡检,每个场景之间的切换时间低于200毫秒,每个场景的巡检时间可自定义长短,同样以400个巡视场景、每个场景停留5秒来计算,完成一次变电所巡检大约需要35分钟。
2.续航时间
1

无人值守远程视控系统所有信息采集终端(包括温湿度、烟雾、水浸、SF6等环境量监测设备;
灯光、空调、风机等智能控制设备;
IC卡/指纹/人脸识别门禁等身份识别设备;
电子围栏、红外对射、声光报警器等周界安防设备;
智能高清监控摄像机、拾音器等智能巡视设备;
红外热像仪、无线测温仪等智能测温设备)均使用集中供电,不存在续航时间的问题, 可以24小时全天候在线保障变电所的运行安全,随时可对变配电所一次、二次设备进行巡视、巡检、监测、监控、远程遥控等。

3.环境适应性
1
4.系统建设要求
1
5.实时性、及时性
1
采用巡检机器人进行变电所的无人值守,其部署数量一般不会大于2套。
而每一套巡检机器人因安装空间、负载、电力驱动等性能原因,不会搭载过多的摄像机及其它传感器,这就会导致以下几个问题:
(1)不能够实现变电所全场景、24小时实时监测。
(2)充电时无法进行巡检:虽然巡视机器人已具备自动充电功能,但由于其充电桩位置固定,就必然会导致充电期间无法进行巡检与监测。
(3)监测A点时,无法了解B点情况:由于机器人搭建的摄像机及传感器较少,而变电所内需要巡检的场景却非常多,当机器人在对A场景进行巡视时,远程值守人员需要查看B场景的设备运行情况,此时,机器人要么不能完成场景切换,要么只能人工控制机器人前去指定的场景。
(4)待机时无法快速奔赴监测点:机器人在非巡检时间内(充电、维修、待机)无法对变电所设施进行监测。
若调度中心值守人员需要查看某场景装置运行情况,此时,机器人要么按预定的指令运动,要么通过人工控制到达现场,而无论哪种操作,在到达目标监测点时都会有个行走过程,考虑到机器人的行走速度,这必然会延长值守人员进行事件查看的时效性,不能够及时查看指定场景。
(5)设备维护、保养时间长,设备一旦停用,整个变电所将面临无“人”值守的情况。
无人值守远程视控系统,不论是哪一类终端传感器,摄像机,均能够实现变电所的全场景覆盖,且设备24小时全天在线,能够实现变电所的实时监测,多个场景之间快速切换。
某一个设备出现故障,不会影响整个变电所的无人值守监测。
6.业务功能
1
7.安全性
1
8.建设成本
1