
产品︱智能无人机系统——多旋翼无人机电力巡检系统
随着电力行业基建规模的快速扩大,对于电力设施及作业环境智能管控的需求也不断增加。然而,传统的人工巡查方式几大弊端:一是工作效率低,劳动强度大,存在人身安全隐患;二是易受各种客观因素影响,在某些复杂特殊的地理环境下,电力线路检测工作困难。随着无人机的发展及普及,小型多旋翼无人机技术的发展,为电网巡检技术的发展提供了一套新的发展手段。其具有设备廉价、易操控的特点,且其资质获取易、飞行高度低、法律风险低、一线人员接受程度高,已广泛应用于电力行业智能管控中。

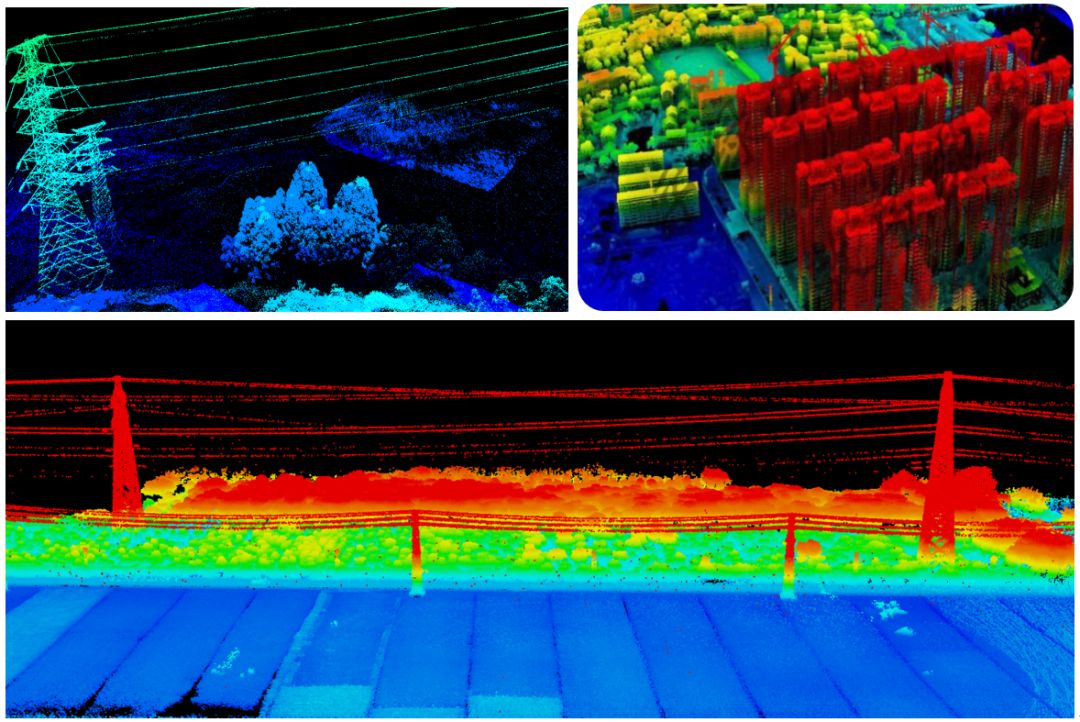
多旋翼无人机电力巡检系统具有全自动实时电力线巡检能力,以先进成熟的多旋翼低空无人机作为载体,一体化集成自主研发的轻小型机载激光雷达系统,实时、快速地采集电力线、塔杆及周边海量高精度点云和影像数据,通过对无人机激光雷达数据和影像数据进行实时配准,实时生成电力线路附近区域彩色激光点云,然后利用深度学习算法对彩色点云进行实时分类,得到电力线对应的三维激光点云,再利用该激光点云数据实时拟合电力线弧垂方程,得到电力线的三维模型,最后采用铅垂线方法对下方地物安全距离进行实时检测。整个过程全自动化,无需人工干预,方便工作人员随时随地发现输电线路设施设备异常和隐患,以及线路走廊中被跨越物对线路的威胁,目前已在无人机电力巡线大范围推广使用。

轻小型机载激光雷达系统
轻小型机载激光雷达系统是一套高度集成了三维激光扫描仪、相机、GNSS、IMU、存储单元及智能控制单元的高精度、超轻小型机载激光雷达测量系统。该系统可实时、动态、快速采集海量高精度点云及丰富的影像信息,为地表三维空间信息的获取、处理和分析提供了一种机动、灵活的低空三维激光雷达作业平台,可广泛应用于电力巡线、地形测绘、堆体测量、林业普查、城市动态监测等领域。

系统配套软件
利用三维激光雷达数据对电力设备故障进行全自动诊断,自动提取电力线和电力塔三维模型,攻克了无人机巡检缺陷及隐患智能排查与诊断关键技术,填补了国内无人机电力巡检故障诊断的技术空白。
多旋翼无人机电力巡检系统包含高分辨影像和三维激光点云数据自动同步获取、一体化融合处理、三维可视化、电力线和电力塔三维模型自动提取、障碍物自动安全距离检测等功能模块。
实时点云生成及拼接
该系统可自动同步获取高分辨影像、三维激光点云、POS数据,系统实时将三种数据进行一体化融合配准,从而得到彩色点云数据。
无人机实时点云显示及拼接
电力线拟合
关注电力线这一特殊地物的提取,设计出的基于激光点云数据的电力线提取算法可精确提取出电力线点云数据,并以此为数据输入生成电力线矢量节点,输出电力线矢量,完成电力线的拟合。经试验该算法有较为理想的提取效果,提取精度可达到厘米级别。
点云分类与电力线拟合
输电杆塔提取
高程值影像上电力线对应的线段一般只有几个像素宽,而杆塔和潜在危险地物为聚集点群,数学形态学中的腐蚀运算具有消除物体边界的作用,因此可以先通过腐蚀运算消除电力线,再用膨胀运算得到连通区域,然后用X均值聚类得到各连通区域的点群,最后通过面积大小来区分杆塔和潜在危险地物。
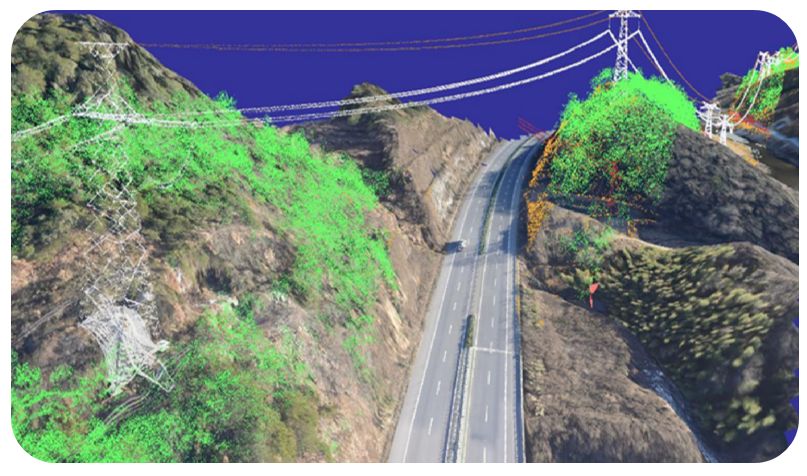
三维场景模拟服务
提供电力巡线三维场景模拟服务,利用倾斜数据、激光点云数据、GPS数据,生动、真实地还原电力线沿线三维空间场景。
障碍物自动安全距离检测
在安全距离分析部分设计结合自动提取的电力线以及DSM数据,计算线路与DSM的距离与标准安全距离做比较,对于距离小于安全距离的区域进行危险预警。具体步骤如下:
(1)通过设定电力线到地表物间的最短距离搜索危险电力线段;
(2)自动分析各电力线在每一剖面上的垂直距离和水平距离,检索出间距较近的电力线段;
(3)对查询出的危险线段以某种颜色表示出来,同时以不同颜色显示出危险障碍物如树木、房屋;
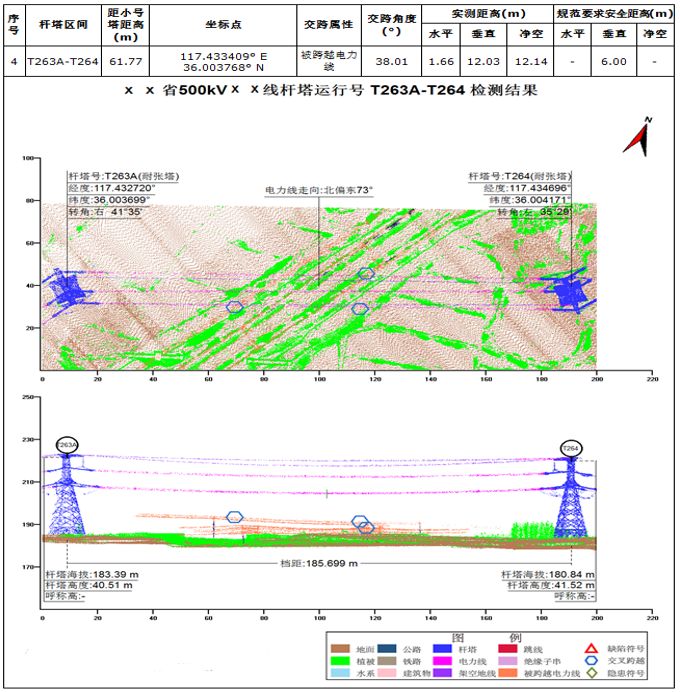
(4)最终能以报告形式给出整条线路的危险等级、危险线路段坐标等信息,以辅助决策。
(1)实时全自动电力巡检,发现问题自动报警。系统支持点云数据、POS参数、设备状态在作业过程实时显示和图传,实现全自动电力线巡检,发现问题自动报警。
(2)系统高集成、低成本,一键化操作。一体化集成三维激光雷达、CCD相机、GPS和IMU等多传感器,集成度高、成本低、性能稳定可靠。
(3)GNSS实时网络差分。不受飞行高度限制和区域限制,无需自建地面基站。
(4)测程远,精度高。最大测程200米,最大采集速度70万点/秒,视场角为360度。系统测距精度2cm,绝对精度10cm,可满足比例尺1:1000的地形测绘要求。
(5)体积小,重量轻。系统总重量3.0kg(不包括相机),适用于多种无人机平台。
从2018年6月至2018年10月,利用无人机电力线路全自动巡检系统在东莞地区完成了4条线路9个架次的无人机巡检任务,巡检范围涵盖了110kV至220kV电压等级的单回和同塔多回线路,所处地形包含平原、山区,极大地提高了输电线路智能化运维水平,效果显著。
采用无人机平台,搭载轻小型机载激光雷达系统沿电力线侧上方进行激光扫描。对现场电力线、电力塔及周边环境进行勘查了解,并对航飞作业做出计划。其中塔高约30米,设计飞行沿电力塔左上方约20米距离飞行。

现场作业图
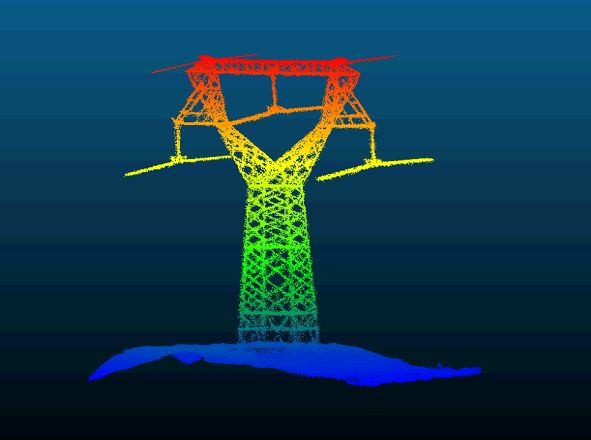
使用自主研发数据后处理软件,基于上述POS数据,对激光点云进行融合,解算出全局点云。
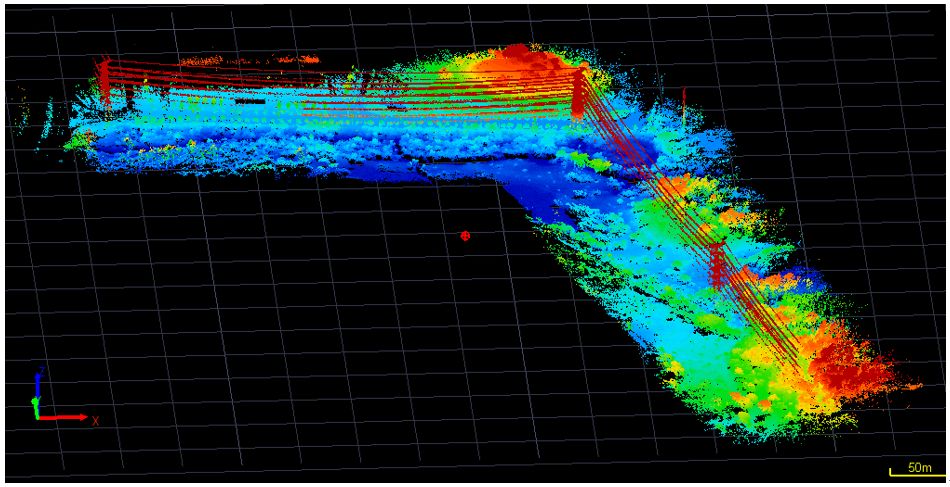
点云效果图
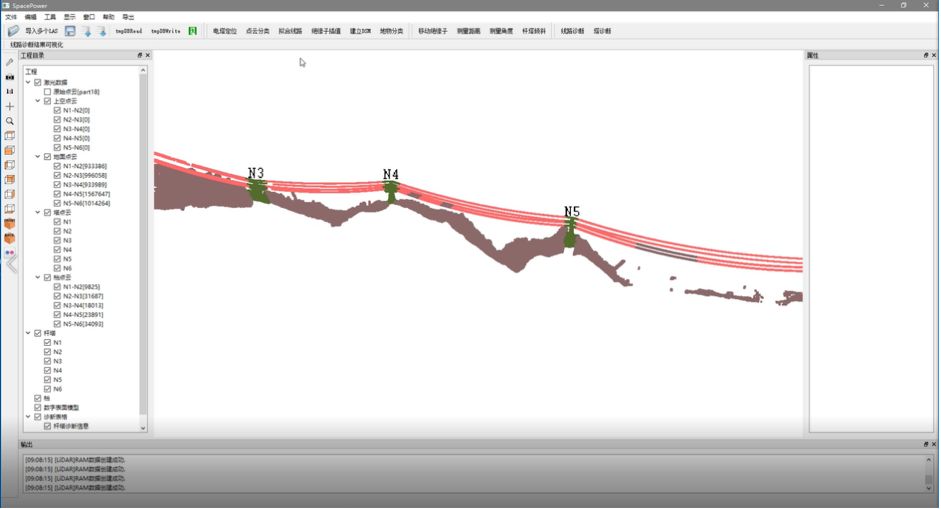
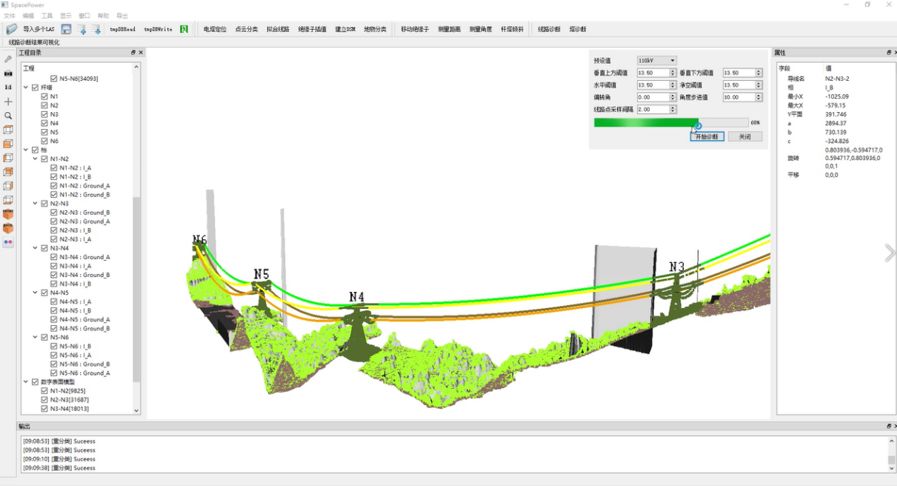
利用本项目自主研发的巡线诊断软件,可以自动从激光点云中提取建筑物、电塔、电力线、地面、树木五大类目标,并对电力线与下方交跨物距离进行测算,对线路安全进行高精度检测。测试段诊断结果表明,该路线在安全距离范围内。
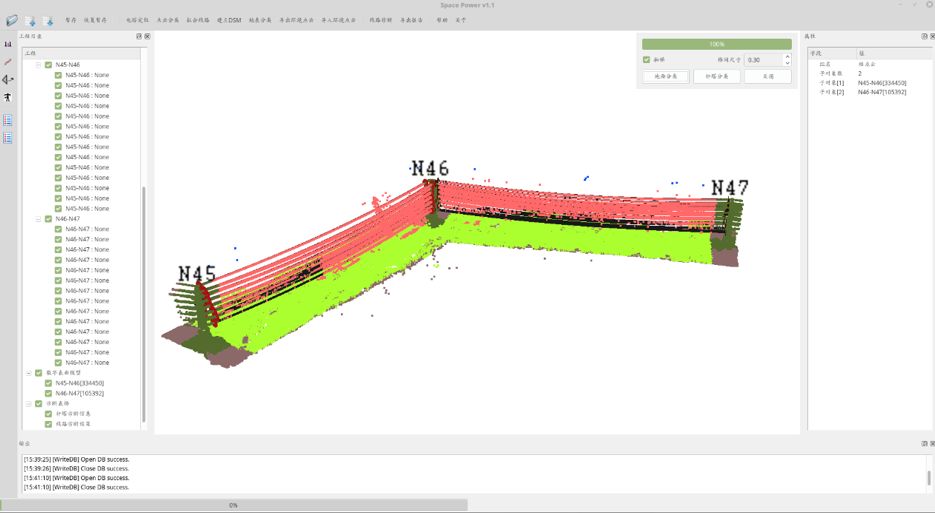
测试段激光点云巡线处理图