
电力巡线太危险 激光雷达来帮忙
输电线路
输电线路定期巡检,能够有效消除可能的隐患或损失,保障电网运行安全。但是人工巡线劳动强度大、效率低,在高压线路检查作业时存在危险,并且对于穿越荒山野岭、深沟峡谷的输电线路无能为力。这时,机载激光雷达就派上用场,大显身手,近几年逐渐被电力部门接受并推广应用。究竟激光雷达是什么?工作原理与流程又是什么?能够在哪些领域发挥作用?
激光雷达是什么?
激光雷达,LightDetectionAndRanging(LiDAR),即激光探测与测距,结合了激光技术与现代光电探测技术,以激光器为发射光源,向探测目标发射高频率激光脉冲来获取目标的空间位置等信息。激光雷达系统通常集成了激光测距技术、全球定位技术(GPS)和惯性测量技术(IMU),能够直接、快速、主动、精确地获取目标的三维空间信息,而且获取的数据密度高、分辨率高。基于这些数据获取优势,激光雷达与成像光谱技术、成像雷达技术并列为对地观测领域的三大前沿技术。
激光雷达按照搭载平台的不同可以分为星载、机载和地基激光雷达。
星载激光雷达主要用于航天、科学试验等,如美国NASA2003年发射ICESat-1卫星上搭载的GLAS(GeoscienceLaserAltimeterSystem)、我国2007年在嫦娥一号上搭载的激光测高仪等。
地面激光雷达则主要用于地物三维精细建模,适于小尺度应用。
机载激光雷达以无人机、直升机等为平台,高频率激光脉冲具有一定穿透性,能够穿透茂密植被冠层,获取林下地形信息,非常适于狭长区域、植被覆盖、地形复杂区域的三维信息获取,这为数字电网建设和线路安全巡检等提供了强有力的技术支撑,其应用可覆盖前期的电网线路规划、勘测、设计施工,乃至后期的数字化管理、安全运营和维护等。
下面我们具体来看看机载激光雷达是如何为数字电网建设和输电线路安全巡检提供技术支撑的。
机载激光雷达工作原理与流程是什么?
我们以中科院遥感与数字地球研究所王成研究员团队的部分研究成果为例,展示机载激光雷达在数字电网建设和输电线路安全巡检中的应用,同时介绍该团队开发的我国首套免费激光雷达点云数据处理软件“点云魔方”中的电力巡检模块。
1、机载激光雷达工作原理
机载激光雷达的工作方式和原理(如图1),即激光测距系统向探测目标主动发射高频率的激光脉冲,直接获取地物表面的距离、坡度、粗糙度和反射率等信息,经过处理生成高密度的三维空间坐标,即点云。激光点云数据的每个点不仅具有x、y平面坐标信息,还具有高程信息,即z值,同时还可从不同视角对这些点云进行三维显示、量测,计算点云所表达目标的表面积、体积等,这也是激光雷达区别于传统光学遥感和微波遥感数据的最大优点。图2是某高压输电线路走廊的原始激光点云数据。
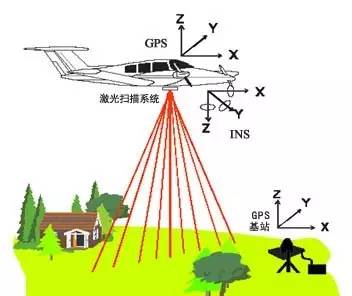
图1机载LiDAR系统工作原理示意图

图2某高压线走廊原始机载激光点云数据(侧视)
2、地物点云分类
输电线路走廊是电网的最主要部分,走廊内地形、地貌、地物(植被、建筑等)、电塔、挂线点位置等是电网建设和管理极为关注的对象。但是一次飞行任务获取的原始点云包括了输电线走廊内的所有地物目标,而实际应用中需要将不同类型地物目标的激光点分离出来,即进行滤波分类。滤波即将原始点分为地面点和非地面点(图3),地面激光点经过插值或构网可得到走廊的数字地形模型(DEM),而非地面点可经过进一步处理提取各类地物点。图4展示了某段输电走廊电力线点云分类结果,图5~图9为各电力要素的点云提取结果。

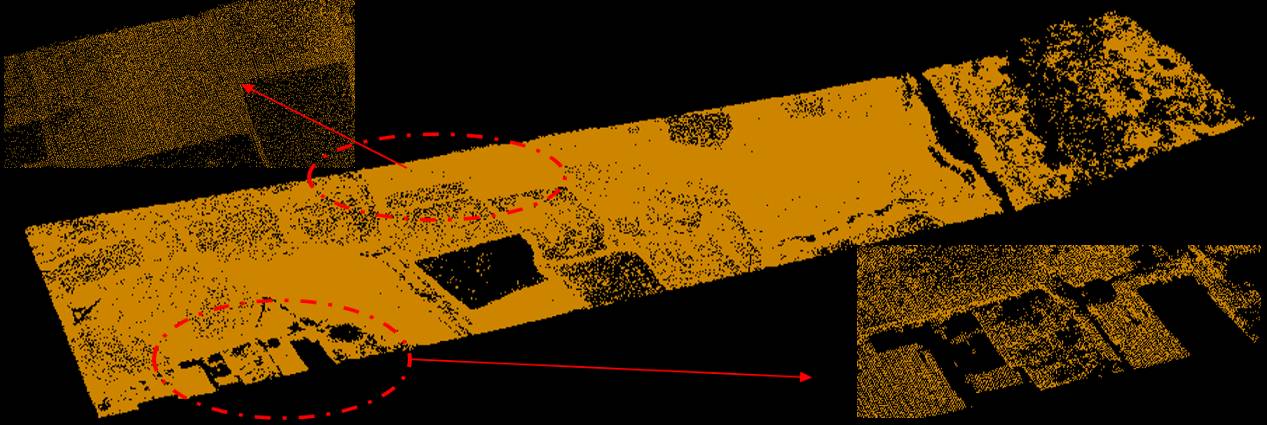
图3滤波结果(上图:原始点云,下图:数学形态学滤波得到的地面点)

图4电力走廊点云分类侧视图
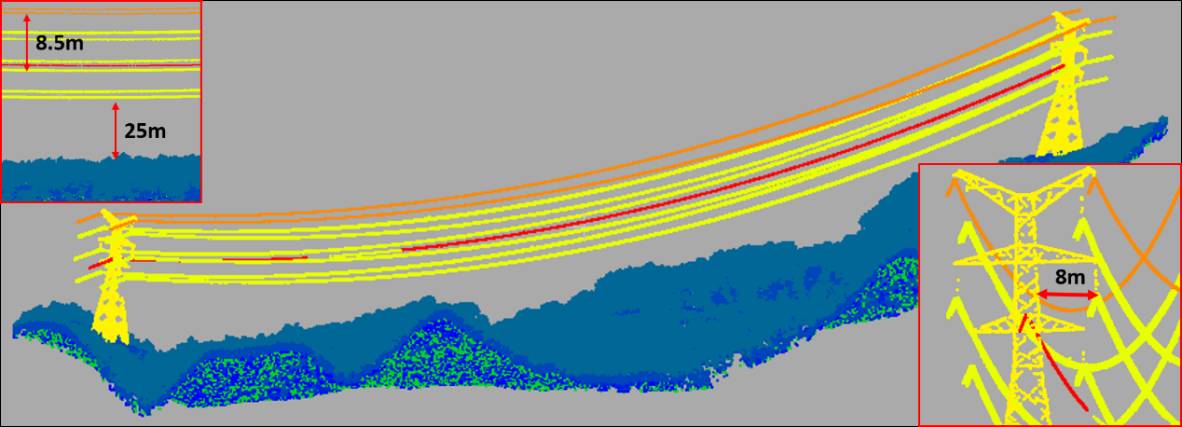
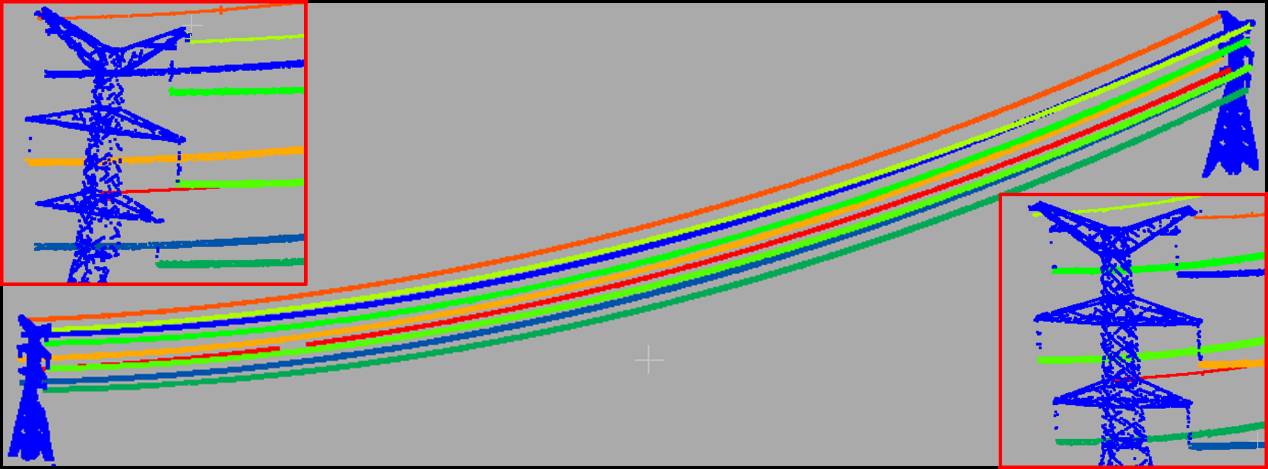
图5电力线点云提取(上图:原始点云,下图:提取的电力线点)

电塔空间位置识别
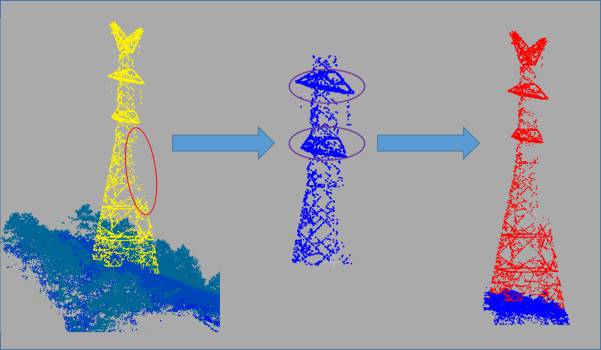
T型电塔提取过程
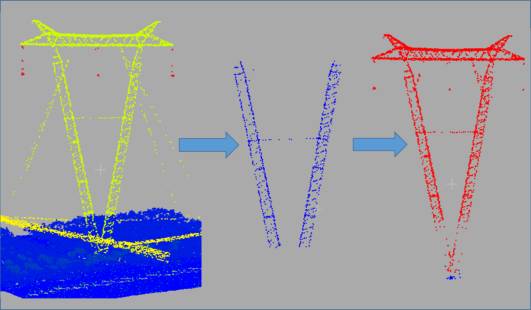
V型电塔提取过程
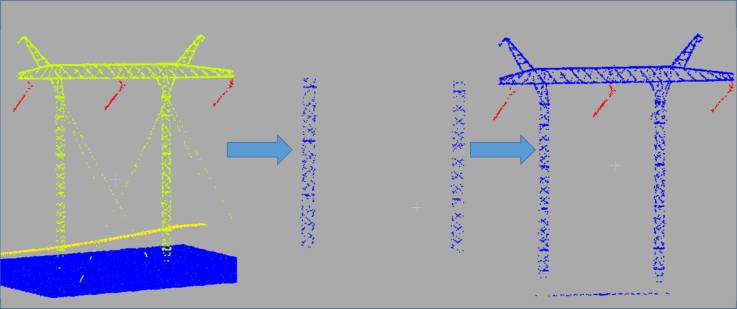
门型电塔提取过程
图6不同类型电塔的激光点云提取过程

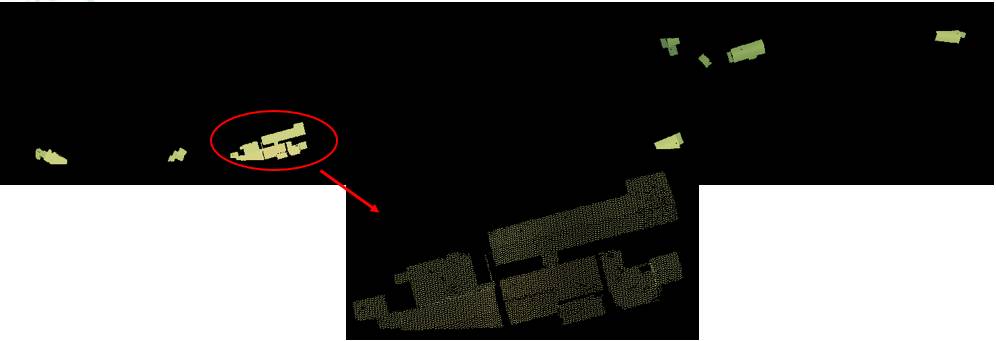
图7建筑物点云提取结果(上图:原始点云,下图:建筑点云提取结果)


图8道路激光点云的提取结果(上图:滤波后的地面点,下图:提取的道路点)

图9输电走廊植被点提取结果(上图:剔除电力线、电塔和建筑点后的非地面点;下图:植被激光点,其中深绿色为高植被,浅绿色为低植被,棕黄色为地面点)
3、电力走廊重建
走廊三维重建也即输电线路本体建模,这是输电线路安全分析的基础。目前,除了DEM等可自动重建外,走廊内的很多地物主要还是依赖于人工勾绘和第三方软件,如AutoCAD、3DMax等。此处以电力线建模为例,展示该团队自动或半自动的建模结果。

四分裂导线点云数据(前视图)

俯视效果

聚类分析

导线建模

局部放大
图10电力线分股与重建流程
4、电力线路安全巡检
电力线走廊数字化重建后,即可得在电脑中直观立体显示电力线、电塔的位置、与走廊地物的空间关系;结合杆塔上安装的温度、湿度、风速等监控设备传回的数据,即可在三维数字化电网基础上进行各种电力作业分析,如预测与模拟不同温度、风速、覆冰下弧垂变化情况,模拟树木生长情况等。图11中红色点表示某些状态下可能会对电力线安全构成威胁的植被点,图12中蓝色点表示树木在生长一段时间后可能会对电力线安全产生威胁的植被点(PLS-CADD)。

图11危险植被点分析

图12输电线路上危险植被点检测
5、机载激光雷达电力应用软件
在国家电网公司科技项目支持下,王成研究员团队在激光雷达点云数据处理软件“点云魔方”中集成了电力应用模块,图13为软件界面(点击此后详细了解该软件)。

图13王成研究员团队开发的机载激光雷达数据处理与电力应用软件界面
该软件主要包括四大核心模块:电力走廊激光点云数据三维渲染模块、点云数据分类模块、电力线模拟分析模块和人工交互模块。软件在实现海量电力线走廊激光点云数据三维渲染的同时,兼具电力走廊点云高效自动分类功能,目前可分六类地物(电力线、电塔、地面、低植被、高植被、建筑和道路)。电力分析模块不仅具有电力线三维重建功能,还具有对实时工况和模拟工况的分析功能,以交跨点、危险点分析报表和电力行业横断面输出为载体,助力电力巡检行业的数字化进程。
以上仅仅是机载激光雷达在数字电网建设与巡检中最基本的工作流程。事实上,激光雷达在电力中的应用面非常广,如架设线路选址、砍伐树木与土方量计算、地质灾害监测、走廊变化检测(如违章建筑、树木生长情况等),还可以结合地面三维激光扫描技术(TerrestrialLaserScanningtechnology,TLS)进行数字变电站建设;融合点云和高分辨率的光学数码影像,实现输电线路走廊真三维数字重建;结合多期点云和影像数据,通过点云滤波、空间差值,以及影像配准和灾前灾后的差值计算,提取地形变化或者其他专题变化图,快速、直观地了解线路上的异常情况,并采取相应应对方案。